

Gelsoft公众号
专业产品新闻和游玩资讯
写在前面,仅用于小批量喜欢动手的玩家,因为不批量生产的话,一些尺寸、材料、工艺的选取只能妥协,不喜勿喷哈。一开始只是想给头像配个波箱,一转眼就小半年过去了。
1.齿轮篇
天梯齿条就不过多分析了,简单校核过,材料45钢齿数30以下用1模的没什么问题(2号波就是1模14齿左右),下面放一个28齿的天梯,行程95mm。

然后说说整个齿轮组,为了适应电机的转速和扭矩输出特性,波箱用了一组齿轮把电机输出的转速降低(顺便贴一组2号波的齿轮参数,蛋糕齿1M30T、0.8M32T,中齿0.8M20T、0.8M39T,伞齿0.8M10T、30T)。常规波箱用的都是带锥齿轮的定轴轮系,说一下局限性,首先是锥齿轮,由于轴向力的存在对装配要求较高,然后是蛋糕齿,由于模数和齿数的原因,蛋糕齿往往较厚重,如果想做更长的行程尺寸识别会更大,响应和平衡问题都很难解决。如果不使用锥齿轮(蜗杆也自动排除了)那就要缩小电机的轴向尺寸,似乎手里航模用的外转子无刷电机(天然的低速高扭)很合适,就是下面这种。我后来才发现infinity就是用的外转子无刷,然后仔细研究了一下他的波箱,那么蛋糕齿过大的问题也解决了……

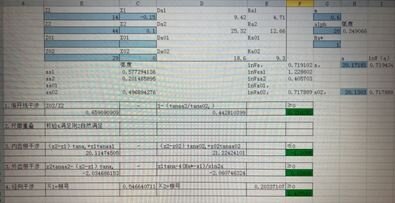
一开始需要的行程是100mm,按照1模的齿轮算和天梯齿条啮合的齿数大概是30个有效齿,考虑到尺寸过大最后缩减为有效28齿,总齿数38,齿顶圆直径40mm。经过了复杂的配齿和变位计算完成了整个齿轮组的设计。
参数如下,内齿圈0.6M44T,行星轮0.6M14T,太阳齿0.6M16T,行星轮4个,变位系数就不写了……还需要验算一下内啮合是不是有干涉(某文库居然要收费就自己写了一个计算器)。
行星轮系大概是这么个样子

然后在设计其它齿轮,最后参数:电机齿0.6M25T,1级减速齿0.6M46T-0.6M14T,2级减速齿0.6M64T-0.6M16T。最后说说工艺,由于小批量成本很高,大多数齿轮只能选用现成的工艺产品,可能是模型车用的也可能是手电钻里的…当然单层齿轮用线切割还是成本还是比较低的,精度也可以。下面是电机和线切割的电机齿。

2.波壳篇
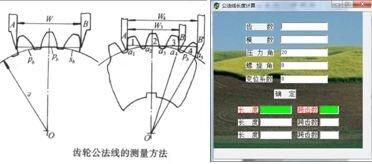
上一篇里解决了轴向力问题,波壳自然可以用薄板来制作,激光切割的精度也可以满足齿轮组的中心距公差。只需要用齿轮参数算出中心距即可,但是齿轮大多是买的现成的,变位系数只能用卡尺量了……
算不准也没事,加工一套试试也行,反正也不贵…
“波壳”大概是这样

3.火控
用了无刷电机,就要用电调,那火控也是必须的了……
电调就不说了,按电机参数选择,启动快就行了。驱动电调需要50hz的pwm方波,波峰宽度1ms为停止,2ms为满油门,实现功能为:接受信号后启动,行星轮大齿转过一周到指定位置刹车,电压不足要能报警。
忘记说了,齿圈上需要打一个孔装磁铁,识别刹车位置,不然就要补加工了,
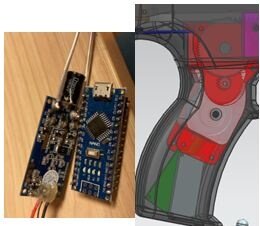
我们选择使用Arduino nano实现这个功能,2个外部中断输入(1个用于启动,一个连接霍尔开关识别齿轮磁铁),1个方波输出,1一个识别电池电压。(本来想加个火焰模拟,板子带不动大功率led就先不加了)电调和Arduino刚好可以放到波箱下面
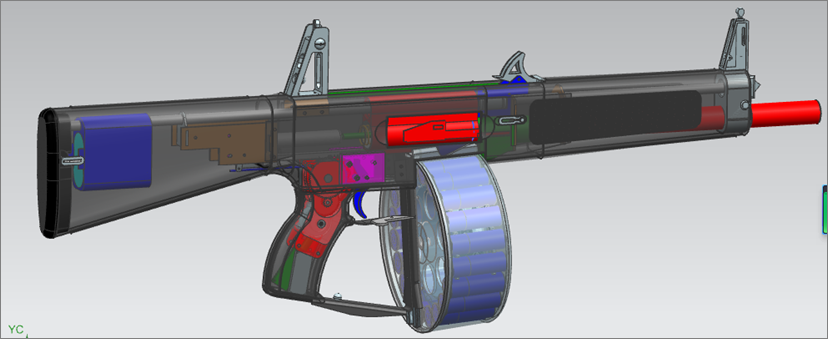
4。总装
该加螺柱加螺柱,该加垫片加垫片。

写在最后:
说一下为什么没有成品图,因为上周查水表了,所有东西都拿走了,本来就剩个外壳没打印了,功能都完好,现在就剩点图片了,021年底大清洗……大清早不发牢骚了。
开始你的表演吧,有手有图纸,什么都会有的!
补几个图


Gelsoft公众号
专业产品新闻和游玩资讯
下载Gelsoft应用
玩家水友聚集地
大佬牛逼
new bee
您
有点惨,叔叔早不来晚不来的。
ikari
2021-12-11
有点惨,叔叔早不来晚不来的。
再给我哪怕半个月,组完把玩够了,估计也没有现在执念了
东西被收走了,就问jc要扣押清单
皮皮痒
2021-12-11
东西被收走了,就问jc要扣押清单
没敢啊,能要回来吗?
您!
焯,太牛逼哩
加油!